No products in the cart.
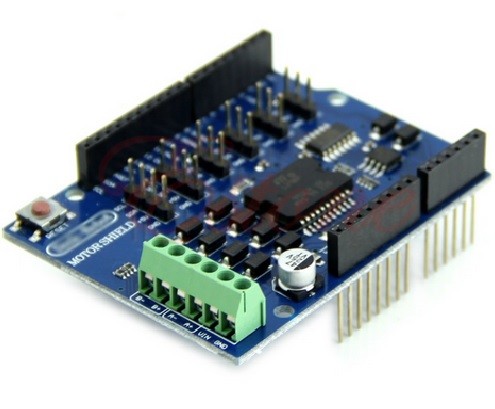

L298P Arduino shield PWM contrôleur moteur DC 2A
In Stock
200.00د.م.
In Stock
Ajouter à la liste de souhaits
CompareAjouter à la liste de souhaits
Pour commander les moteurs DC
Description
Déscription:
L’Arduino Moteur Moteur Shield est basé sur le contrôleur L298, qui est un double pont en H idéal pour piloter les composants inductifs comme les relais, bobines, moteurs à courant continu et moteurs pas à pas.
Ce shield permet de piloter facilement deux moteurs à courant continu en pilotant le sens de rotation et la vitesse de chacun, mais il est egalement facile de piloter un moteur pas à pas à 4 canaux.
Une mesure de consommation en courant pour chaque moteur est également disponible.
Ce shield est egalement compatible des éléments TinkerKit est dispose :
2 connecteurs TinkerKit pour 2 entrées analogiques (pins A2 et A3)
2 connecteurs TinkerKit pour 2 sorties analogiques PWM (pins D5 et D6)
2 connecteurs TinkerKit pour interfaces TWI.
Caractéristiques :
Alimentation : 5V à 12V par un connecteur à vis.
Contrôleur moteur : L298 – 2 moteurs à courant continu ou un moteur pas à pas
Courant Max : 2A max par moteur ou 4A max avec une alimentation extérieure
Mesure de consommation : 1.65V/A
Fonction de freinage du moteur (deccélaration)
Modèle : R3 Rev3 avec pinout 1.0
Fonctionnement :
Le shield dispose de 2 canaux, A et B, qui utilise chacun 4 pins de l’Arduino. Les deux canaux peuvent être utilisé séparement afin de piloter deux moteurs à courant continu, ou ensemble pour piloter un moteur pas à pas.
ocumentation :
Documentation de Arduino Motor Shield Rev3 : http://arduino.cc/en/Main/ArduinoMotorShieldR3
– See more at: http://boutique.semageek.com/fr/58-arduino-motor-shield-r3.html#sthash.snxZtisp.dpuf
Documentation :
Documentation de Arduino Motor Shield Rev3 : http://arduino.cc/en/Main/ArduinoMotorShieldR3
Datasheet du L298 : CD00000240.pdf
Shéma du Arduino Motor Shield : http://arduino.cc/en/uploads/Main/arduino_MotorShield_Rev3-schematic.pdf
Répartitions des pins :
| Fonction | Canal A | Canal B |
| Direction | D12 | D13 |
| Vitesse (PWM) | D3 | D11 |
| Frein | D9 | D8 |
| Consommation | A0 | A1 |
Il est possible de désactiver les fonction « Frein » et « Consommation » en séparant les jonctions sur la face inférieure de la carte. Cela permet de récupérer ces pins pour une autre utilisation.
– See more at: http://boutique.semageek.com/fr/58-arduino-motor-shield-r3.html#sthash.snxZtisp.dpuf
Répartitions des pins :
| Fonction | Canal A | Canal B |
| Direction | D12 | D13 |
| Vitesse (PWM) | D3 | D11 |
| Frein | D9 | D8 |
| Consommation | A0 | A1 |
Il est possible de désactiver les fonction « Frein » et « Consommation » en séparant les jonctions sur la face inférieure de la carte. Cela permet de récupérer ces pins pour une autre utilisation.
– See more at: http://boutique.semageek.com/fr/58-arduino-motor-shield-r3.html#sthash.snxZtisp.dpuf