No products in the cart.


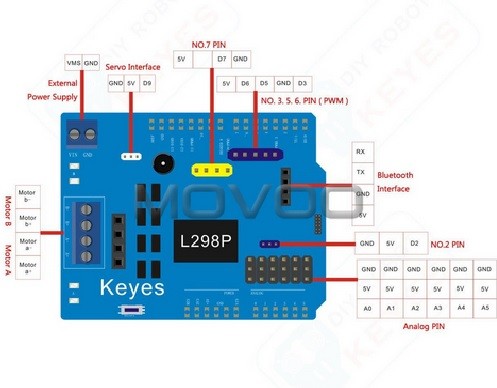



L298P PWM contrôleur moteur avec Interface Bluetouth
In Stock
220.00د.م.
In Stock
Ajouter à la liste de souhaits
CompareAjouter à la liste de souhaits
Module de puissance double pont H équipé d’une Interface bluetooth, Contrôleur de vitesse PWM, Compatible avec Arduino
Description
Caractéristiques:
- Température de fonctionnement: -25°c ~ +130°c
- Puissance de dissipation: 25W (T= 75°C)
- Type: Circuits intégrés logiques
- Alimentation en voltage: VIN 6.5 ~ 12V, PWR IN 4.8 ~ 24V
- Numéro du modèle: Speed Controller
- Logical input voltage VD:: DC 5V
- Drive working current Io: ≤ 2A
- Maximum power dissipation: 25W (T= 75 Celsius )