Sous-total : 290.00د.م.
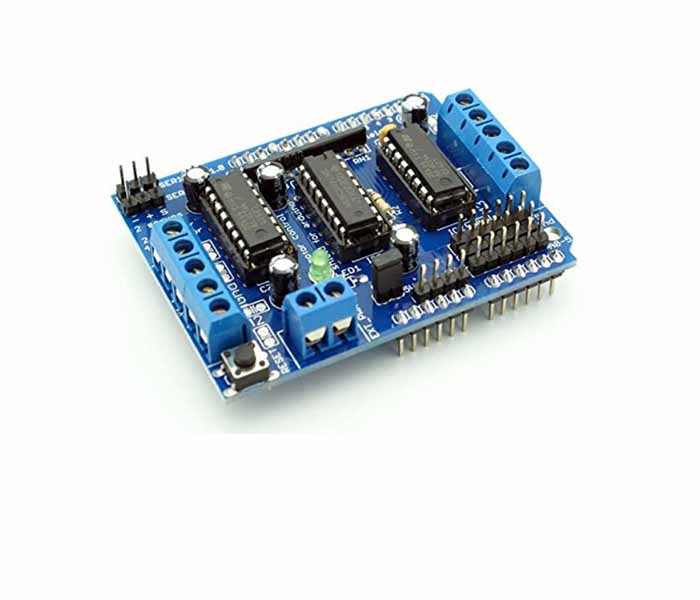
Modèle 1
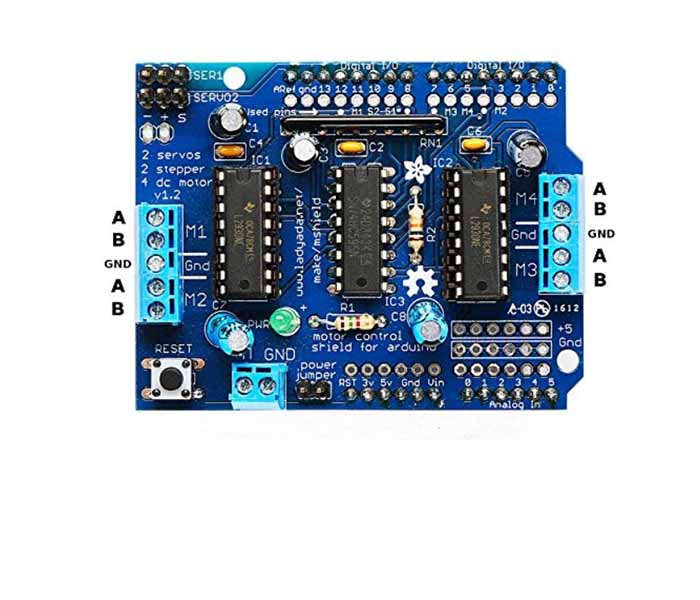
Le shield L293D s’emboîte directement sur une carte Arduino (Uno, Mega…) et rajoute des fonctions de commande de moteur à courant continu et pas à pas : réglage de la vitesse (par pas de 0.5%) et du sens de rotation des moteurs.
Il peut gérer simultanément grâce à 4 ponts en H :
4 moteurs à courant continu DC ou 2 moteurs pas à pas (unipolaires ou bipolaires) en mode une seule bobine, double bobine, demi pas, ou micro pas.
Il gère en même temps 2 servomoteurs de modélisme (standard 5V).
Une librairie permet de gérer les accélérations et freinages des moteurs pas à pas.
Le PWM peut aussi commander un solénoïde, une intensité d’éclairage, un relais…avec les 8 demi ponts.
Le shield comporte 2 puces L293D, drivers de moteurs, et un registre à décalage 74HC595. Celui ci étend 3 pins de l’Arduino vers 8 pins pour contrôler la direction des drivers de moteurs.
Les sorties output enable des L293D sont directement connectées aux sorties PWM de l’Arduino (modulation de largeur d’impulsions), pour le contrôle de la vitesse de rotation des moteurs.
Une entrée 5V permet de ne pas utiliser le 5V de la carte Arduino pour alimenter les servo moteurs et éviter de faire chauffer la carte.
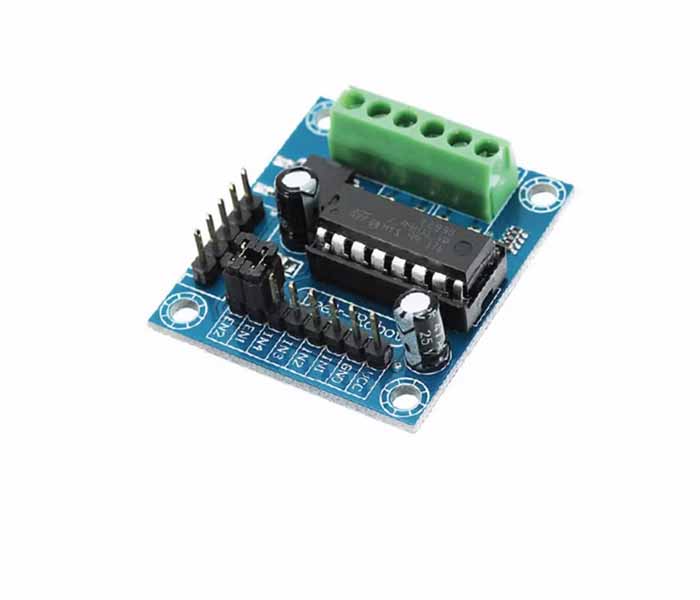
Modèle 2
L293D module driver moteur permet de contrôler jusqu’à deux moteurs à courant continu, avec une tension d’entrée de 4.5-25V et une capacité de courant de sortie de 600 mA par canal. Le module a des fonctionnalités comme la protection contre la surchauffe, et des diodes de serrage internes.
Compatible avec Arduino UNO et Mega 2560, Le L293D est adapté pour diverses applications, notamment dans les projets Arduino, la robotique, les systèmes d’automatisation, les buts éducatifs, et l’équipement expérimental.
Le module L293D est un bouclier de commande de moteur pour Arduino sert à piloter deux moteurs à courant continu. Il possède plusieurs broches pour la connexion et le contrôle des moteurs
Il offre aussi une entrée d’alimentation de 9V à 24V pour les moteurs et dispose de deux broches de masse. Il incluent une tension d’entrée de 4.5-25V, une capacité de courant de sortie de 600 mA par canal, et un courant de sortie de crête de 1.2A.
Le L293D module est équipé de protections contre la surchauffe, de diodes de serrage internes, et est utilisé comme un pilote monolithique intégré à haute tension et à fort courant.
L293D module driver peut contrôler des moteurs pas à pas 2 voies, et des servos bidirectionnels, tout en étant compatible avec Arduino UNO et Arduino Mega 2560.
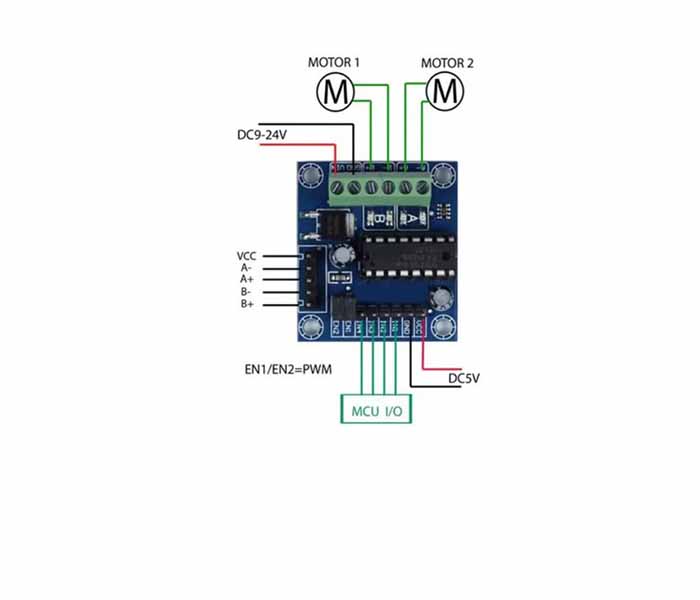
Les broches du L293D module mini driver moteur:
VCC : C’est l’alimentation électrique du driver lui-même, qui peut généralement être de +5V à +12V.
A-, A+ : Ce sont les broches de sortie pour le Moteur 1. Elles se connectent aux deux bornes du premier moteur à courant continu.
B-, B+ : Ce sont les broches de sortie pour le Moteur 2. Elles se connectent aux deux bornes du deuxième moteur.
EN1/EN2 = PWM : Ce sont les broches d’activation pour les deux moteurs et peuvent être utilisées pour contrôler la vitesse des moteurs. EN1 contrôle généralement le Moteur 1, et EN2 le Moteur 2.
DC5V : Cette broche est pour une alimentation externe au microcontrôleur, fournissant +5V depuis le bouclier moteur lorsqu’il est connecté.
DC9-24V : C’est l’entrée d’alimentation électrique du moteur pour le driver, qui fournit l’énergie nécessaire pour piloter les moteurs. La plage de tension indique que le driver peut gérer des moteurs avec une tension d’alimentation entre 9V et 24V.
Ground : Le L293D a deux broches de masse .
MCU I/O : Ces broches sont pour se connecter aux ports d’entrée/sortie de l’unité de microcontrôleur (MCU). Elles reçoivent les signaux du microcontrôleur pour contrôler la direction et la vitesse des moteurs.
Spécifications techniques du L293D mini driver pour deux moteurs
| Modèle | Modèle 1, Modèle 2 |
|---|