No products in the cart.
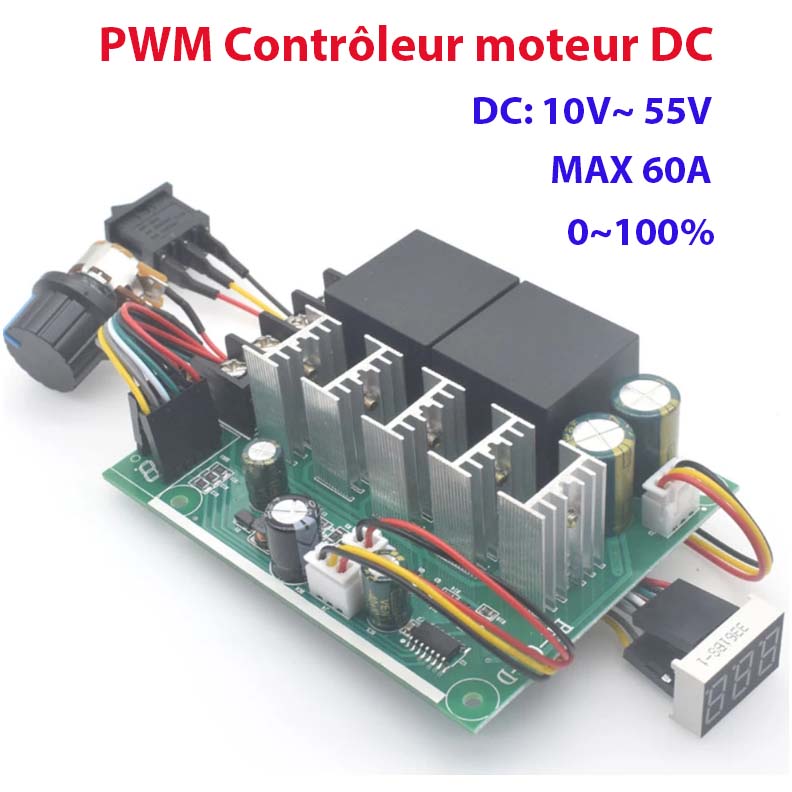
60A DC 10V-55V PWM contrôleur variateur de vitesse moteur DC
Out of stock
250.00د.م.
Out of stock
Ajouter à la liste de souhaits
Ajouter à la liste de souhaits
Description
- Tension d’entrée: cc 10V-55V
- Tension de sortie: linéarité sous charge
- Courant Max: 60A
- Courant persistant: 40A
- Plage de contrôle de vitesse: 0%-100%
- Fréquence de contrôle: 15kHz
- Méthode de régulation de vitesse: potentiomètre (commutateur de bande)
- type de contrôle de vitesse: courant de régulation
- Avant et inversion: Support (pas de commutateur de verrouillage)
- Plage d’affichage numérique: 0-100 Moteur
- 11.Support: moteur de brosse à courant continu
- Taille du Module: 100mm * 76mm * 28mm(L * W * H)
- Poids: 170g
Remarque:L’affichage LED de 0-100, c’est le pourcentage de la vitesse du moteur, pas la vitesse réelle du
Moteur. La tension d’entrée doit être la même avec la tension nominale du moteur.