No products in the cart.


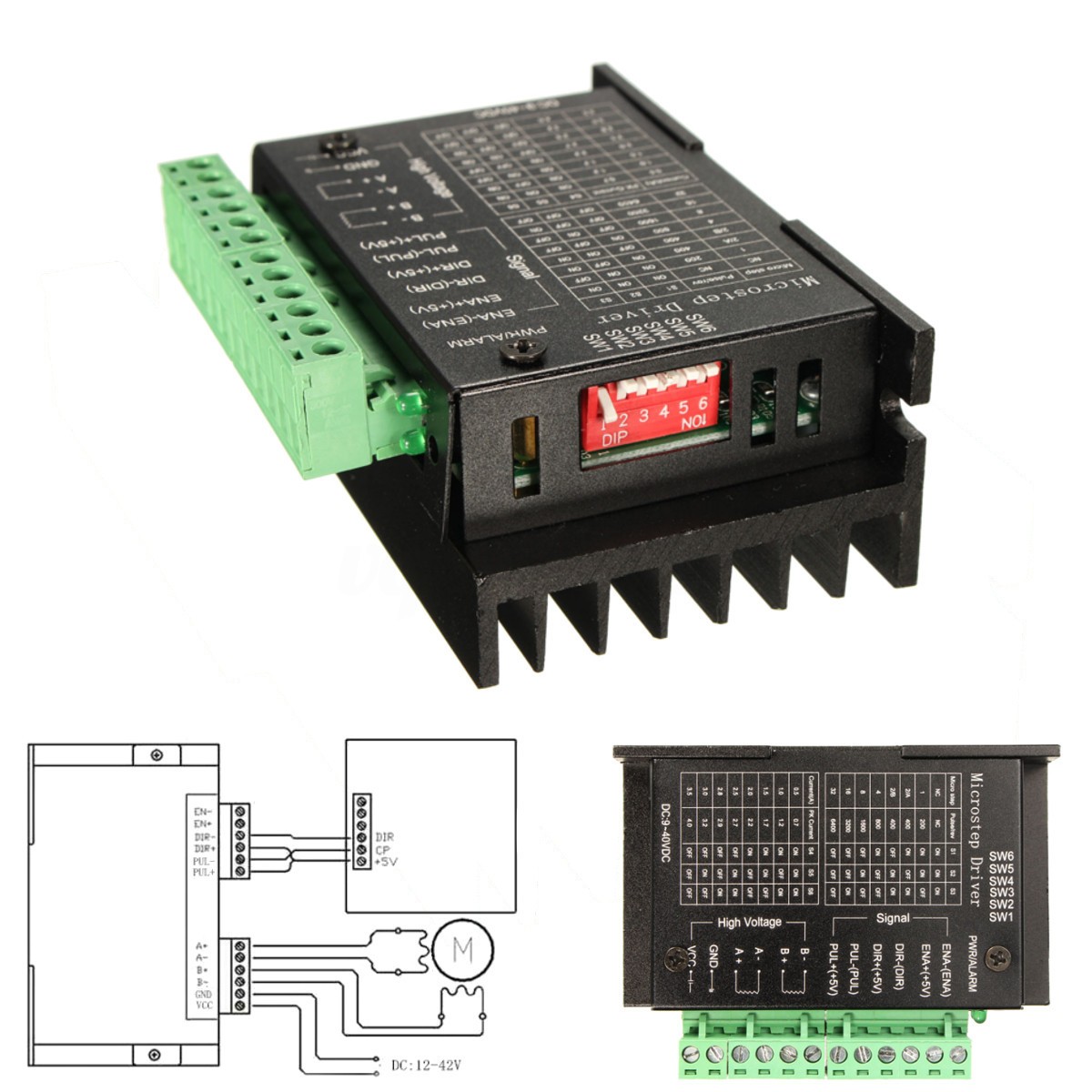
TB6600 Driver moteur pas à pas 4A DC 9~42V
In Stock
200.00د.م.
In Stock
Ajouter à la liste de souhaits
CompareAjouter à la liste de souhaits
- Driver pour moteur pas à pas
- Courant Max: 4A
- Machine CNC
Description
- Matériel: métal
- Tension d’alimentation: 9 ~ 42VDC
- Tension d’entrée: DC 12 ~ 48V
- Température de fonctionnement: -10 à 45 ˚Degrees Celsius
- Courant d’entraînement maximum: 4A
- Fréquence de hachage: 20KHZ